
След като предишния път напазарувахме, сега ще запретнем ръкави и ще започнем реалната работа по нашия квадрокоптер. Днес ще разберем как да свържем отделните му компоненти и как да направим сами някои от тях.
Изработване на рамката
Необходими материали:
- 1 бр. П-образен алуминиев кант профил (2 m)
- 1 бр. дървена плоскост 11x11x0,7
- 0,5 m гъвкава полипропиленова тръба за парна инсталация ø16
- 4 бр. винт М4х30
- 4 бр. винт М3х12
Трябва да започнем от рамката, тъй като ще разполагаме всичко по нея. Не твърдя, че представеното от мен предложение за рамка е най-доброто (малко е тежичка), но затова пък е изработена изцяло от евтини лесно достъпни материали, които можете да си набавите от най-близкия магазин, веднага след като разбиете квадрокоптера си някъде, лесно ремонтируема e и е много здрава.
Основните усилия в рамката се поемат от централната пластина – дървена плоскост, която съм изрязал с посочените размери от малка кухненска дъска, направена от някакво много здраво дърво. От лайсната (на чертежа по-долу можете да видите размерите на профила, който използвам) се изрязват четири парчета с дължина 19 cm, които се монтират в единия си край към ъглите на дървената дъска. Една забележка – аз използвам планки от фибростъкло при монтажа на двигателите, които увеличават фактическата дължина на рамената на рамките . Те обаче са по-скоро аксесоар и можете да монтирате двигателите направо към алуминиевите рамена, само че тогава трябва да ги изрежете с 3 cm по-дълги.
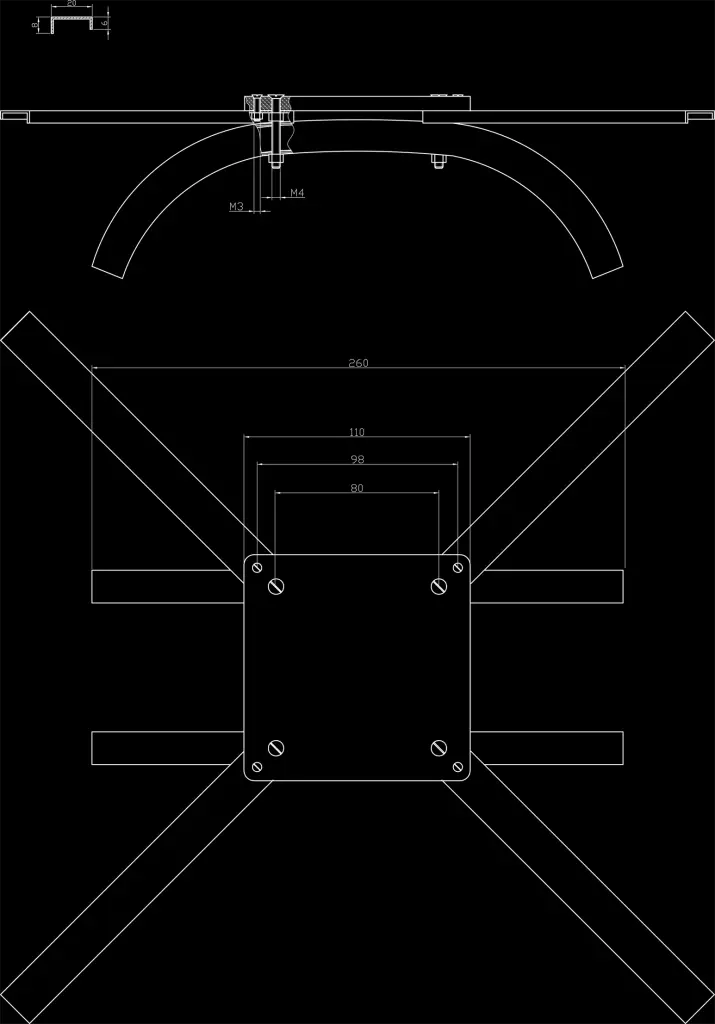
Гъвкавата тръба ще служи за колесник на рамката. Трябва да подходим с внимание към колесника, защото всъщност заедно с витлата, това са най-податливите откъм чупене части от квадрокоптера. Идеалният колесник е лек, здрав и леко еластичен. Хубаво е да устойчив както на нормални натоварвания (при натиск), така и на странични (при огъване); хубаво е той да се монтира към централната пластина, която е най-здравият елемент от конструкцията, а не към четирите рамена; хубаво е опорните му точки да са максимално раздалечени една от друга… Тръбата е добър компромисен вариант, който в някаква степен отговаря на всички тези условия. И е нещо, което остана от последния ремонт 🙂 Изрежете от нея две парчета с дължина около 26 cm. Пробийте в тях по два отвора и монтирайте всяко от парчетата към два от винтовете М4. Огънете тръбите бавно, така че да се получат дъги, като внимавате да не ги скъсате.
Изработване на захранваща платка
Необходими материали:
- 4 бр. женски Т-конектори
- 1 бр. мъжки Т-конектор
- 2 бр. шайби М20
„Платка” в случая не е точната дума, но ще я използваме, за да е ясно какво имаме предвид. Идеята е да захраним четирите контролера от батерията. Четирите женски Т-конектора ще включваме към контролерите (предполага се, че преди това сте запоили мъжки конектори на захранващите кабели на контролерите). Разположете ги един срещу друг с краищата им, които трябва да се запоят. Трябва да запоите хоризонталните изводи на конекторите към едната шайба, а вертикалните над тях – към другата. Звучи просто и наистина е, но спойките трябва да бъдат качествени и стабилни. Остава да запоите и две парченца кабел 1,5 mm^2 по 10 cm. Единият край на всяко от кабелчетата трябва да запоите към една от шайбите, а другият край – към съответният извод на мъжкия Т-конектор, който ще се включва към батерията. И това е. Проверете дали работи както трябва – включете батерията и контролерите към „платката”, като се уверите преди това че поляризацията ви е правилна (черните кабели на контролера трябва да отиват към масата на батерията, червените – към плюса). Трябва да чуете звукова сигнализация (ако сте запоили и двигателите към контролерите преди това). При успех покрийте шайбите с колофон или някакъв лак, за да ги изолирате. И още нещо – за да си улесните монтажа на платката върху рамката и да увеличите механическата й якост, залепете със секундно лепило платката върху диск от изолационен материал с подходящи размери (аз използвам пластмасова врътка от старо радио). Монтирайте към рамката чрез винт.
Зареждане на батерията и изработване на зарядно устройство.
Трябва да подхождате с голямо внимание при експлоатацията на литиево-полимерните батерии, тъй като непредпазливост при работата с тях ще съкрати живота им, а не е изключено и да ги възпламените. Ето няколко съвета, които е препоръчително да спазвате:
- Не допускайте батерията да понася механически удари. Поради позицията и на рамката тя е особено уязвима към удари при по-твърди кацания, но подобни удари могат да доведат до окъсяване на електродите й и възпламеняване;
- Не допускайте батерията да се нагрява;
- Не допускайте батерията да се разрежда под 3 V на клетка (9 V за 3S LiPo батерия);
- Не допускайте батерията да се разрежда с по-голям ток, отколкото е указано от производителя;
- Не зареждайте батерията с по-голям ток от максимално допустимия и не зареждайте батерията до по-високо напрежение от максималното й напрежение.
Максимално допустимият ток на зареждане, независимо дали е уточнен или не от производителя, не трябва да надхвърля стойността на капацитета на батерията – характеристика, отбелязвана като „1С”. В нашия случай с 2200 mAh батерия не трябва да я зареждаме с по-голям ток от 2,2 А. Всъщност дори и с по-малко – хубаво е да се застраховаме, защото е възможно реалният капацитет на батерията да е по-нисък от обявения от производителя.
Когато получите LiPo батерията си и я измерите с мултицет най-вероятно ще установите, че тя е заредена до около 11 V (по около 3,7 V на клетка). Това е напрежението, при което батерията трябва да се съхранява, но не е оперативното й напрежение. Преди да се използва, батерията трябва да се зареди до 4,2 V на клетка или общо 12,6 V. Запомнете, че дори минималното превишаване на максималния заряден ток или оперативното напрежение на батерията ще доведе до влошаване на характеристиките и намаляване на живота й. При правилна експлоатация тя би могла да изкара няколко стотин зарядно-разядни цикъла.
А ето и как да си направите просто зарядно за батерията.
ВНИМАНИЕ! При неправилна и невнимателна изработка и експлоатация на представените по-долу зарядни устройства рискувате да увредите необратимо батерията си и още по-лошо – да предизвикате пожар. Ако не сте сигурни в уменията си, използвайте само специализираните зарядни устройства.
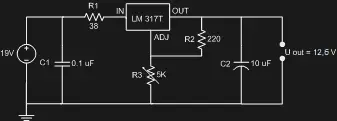
Това е максимално опростената схема на зарядното. Входното напрежение взимам от зарядно на лаптоп, което в моя случай дава на изхода си ток с напрежение 19 V и големина 1,6 А. Резисторът R1 (1 W) определя големината на зарядния ток ( I = Uin/R1). По принцип регулаторът на напрежение LM317T работи с максимален ток до 1,5 A, така че трябва да се съобразите с този факт. При тази схема препоръчвам да работите със заряден ток до 500 mA, за да избегнете прекомерното нагряване на регулатора и резистора. Изходното напрежение трябва да е равно на 12,6 V и се постига приблизително по формулата Uout = 1,25 V * (1 + R3/R2). С ръчно регулиране на R3 ще постигнете нужното напрежение. Преди всяко зареждане проверявайте дали изходното напрежение е колкото трябва. Включвайте зарядното първо към захранване и след това към батерията. Остава да изчакате около два часа, докато се зареди батерията.
Въз основа на тази схема можете да изготвите друга по-добра, но и по-сложна, която елиминира два недостатъка на простата:
- не зареждате с постоянен ток. Токът е най-голям в началото на зареждането, когато напрежението на батерията е най-малко, и непрекъснато намалява. Това увеличава времето за зареждане.
- не зареждате балансирано клетките на батерията. Всяка от трите клетки трябва да се зареди точно до 4,2 V, но след определен брой зареждания някои започват да се зареждат по-бързо от други, така че, когато стигнете до 12,6 V за цялата батерия, всъщност една от клетките може да е заредена до 4,3 V, а друга – до 4,1 V и т.н. Зареждане над допустимото дори само с 0,1 V ще съкрати живота на батерията. Принципно клетките на новите батерии се зареждат синхронно, но след стотина зарядно-разрядни цикъла, трябва да помислите как да решите този проблем.
Тъй че понякога ще се налага да зареждате батерията си не през основния Т-конектор, а през допълнителния четирипроводен куплунг за балансирано зареждане. Схемата, по-която можете да извършвате такова зареждане (взел съм я от този сайт – http://www.coolcircuit.com/project/lipo_charger/lipo_charger.html), е следната:
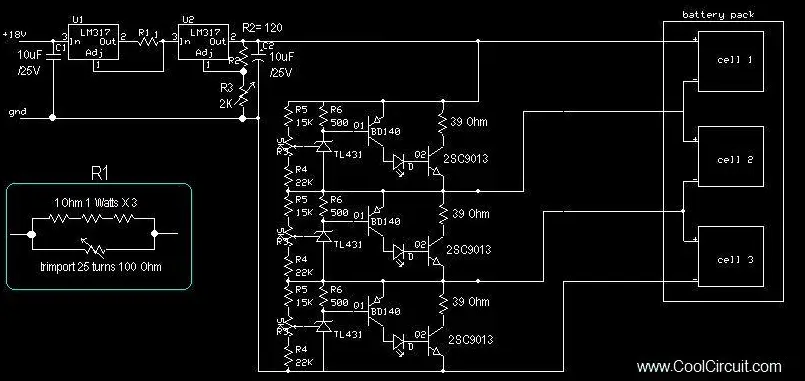
Това е схемата, която използвам в момента, изпитана е и работи. Първият LM317T този път служи като регулатор на тока. Той поддържа постоянен ток – големината му се определя по формулата I = R1/1,25, като в сила отново са съображенията, които разгледахме по-горе (ограничение до 1,5 А). Схемата позволява зареждане както през Т-конектор направо към 12,6 V, така и чрез балансиращия куплунг, като при заредена батерия светват светодиодите.
Каквото и зарядно устройство да използвате, следвайте тези правила за безопасност:
- винаги проверявайте с мултицет напрежението на зарядното устройство преди зареждане;
- когато зареждате батерията, поставяйте я върху огнеупорна повърхност – най-добре бетонен под.
- и най-важно – докато батерията се зарежда, не я оставяйте без надзор!!!
Монтаж на частите
Двигателите се закрепват или направо към рамката или като първо се монтират към кръстовидните алуминиеви подложки, които се продават заедно с тях. Както споменах по-горе, аз използвам монтажни подложки от фибростъкло. Витлата се монтират по следния начин. Първо се слага подходящо уплътнение (уплътненията се продават заедно с витлата) върху вала на двигателя. То трябва да влезе стегнато до долу. След това се слага долната част на приставката, витлото и накрая горната част на приставката, която се завинтва, докато всичко се затегне здраво.
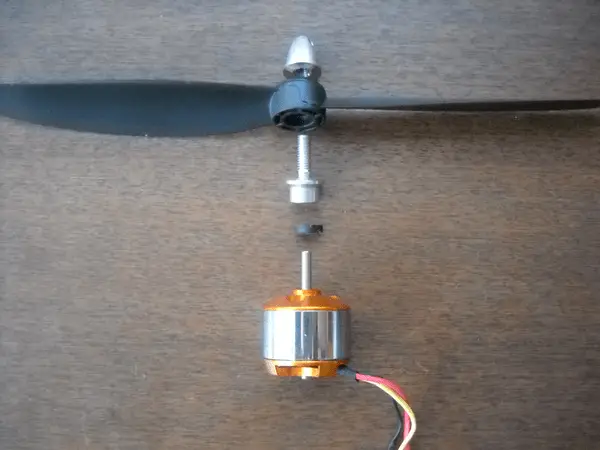
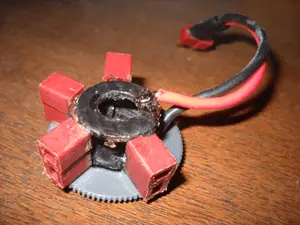
И малко встрани от темата. Неприятно е, но тъй като споменах, че може да има проблеми с двигателите, не е зле да се научите да ги отваряте, за да отстраните някои дребни дефекти, ако има такива. Например в един от моите двигатели бе попаднал някакъв боклук, заради който роторът не можеше да се върти свободно, така че се наложи да го отворя и да го почистя отвътре. Отварянето на двигателя става по следната методика. В долната част на двигателя върху канал на вала е разположена черна плоска пружина, която фактически държи за статора ротора и запресованият към него вал. За да освободите ротора, трябва да изтикате настрани пружината посредством пинцета (най-добре) или малка отвертка. Внимавайте, защото пружинката може да изскочи и да я изгубите или по-лошо: да попадне в окото ви. След като махнете пружината, можете да освободите горната част на двигателя, която вече се държи на място единствено поради силата на неодимовите магнити. Тук можете да видите видео, в което един човек разглобява такъв двигател и му сменя лагер.
Полетният контролер трябва да се сложи в центъра на квадрокоптера. Важно е да не монтирате платката направо към централната пластина – твърдите съединения ще предадат вибрациите от двигателите към контролера и това ще доведе до влошаване на работата на акселерометричните датчици на контролера. Тези вибрации трябва да се демпфират при контролера и най-лесният начин за това е да използвате като подложка кутийката от черна пяна, в която би трябвало е опакован контролерът. Залепете долната част на кутийката върху централната пластина с моментно лепило (не разяжда пяната – пробвано) или двойнолепящо тиксо. Фиксирайте платката на контролера към подложката посредством винтчета в четирите ъгъла.
Батерията трябва да се постави от долната част на централната пластина. Прикрепил съм с винтчета една лека дървена подложка към тръбите на колесника и към нея закрепям батерията. Необходимо е батерията да е здраво закрепена, да не се мести насам-натам, така че тя трябва да се фиксира с велкро лепенки, свински опашки или тиксо.
При монтажа на частите е хубаво центърът на тежестта на квадрокоптера да съвпада с геометрическия му център (центъра на централната пластина). По принцип полетният контролер е способен да компенсира отклонения на центъра на тежестта така че да поддържа хоризонтално положение на рамката в полет и да противодейства на наклона. Само че за тази цел ще трябва да си поиграете с настройките на контролера, а поне в началото ще ви е по-лесно да излитате с балансиран квадрокоптер. Ако центърът на тежестта е отклонен, шансовете са, че квадрокоптерът няма да излита вертикално нагоре, а ще се отнася към страната, която тежи повече. Освен това батерията ще свърши по-бързо, тъй като един от двигателите непрекъснато ще харчи повече ток, за да се върти по-бързо и да противодейства на наклона. Балансирането става лесно, като променяте положението на батерията върху рамката – тя е най-тежкият елемент и малко преместване оказва съществено влияние върху центъра на тежестта на квадрокоптера.
А как да балансираме квадрокоптера? Ето един прост, бабешки метод, който върши работа. Вземете четири еднакви ластика и ги промушете през четирите рамена на рамката до централната пластина. Вържете ги с въженце един с друг, така че мястото на възела да е над геометрическия център. Като вдигнете квадрокоптера за въженцето, ако той остане видимо хоризонтален значи е добре балансиран. Ако е наклонен на една страна, преместете батерията, така че да стане хоризонтален. Висока точност на хоризонтирането не е нужна – доверете се на окото си или на показанията от сензорите на контролера.
Окабеляване и връзки
Отделните компоненти на квадрокоптера се свързват по следната принципна схема.
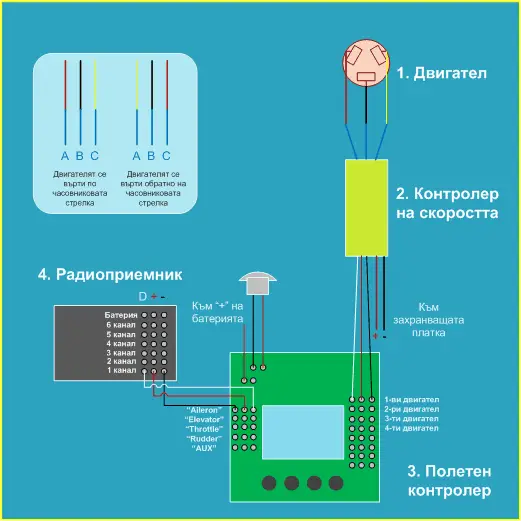
Започнете от двигателите. Трябва да запоите трите проводника (червен, жълт и черен) , които излизат от двигателя с трите сини проводника, които излизат от контролера на скоростта. Имайте предвид, че два срещуположни двигателя трябва да се въртят в една и съща посока (по часовниковата стрелка), а другите два срещуположни двигателя трябва да се въртят в обратната посока (обратно на часовниковата стрелка). Добре е още сега да определите кои двигатели накъде ще се въртят. Полетният контролер поддържа два типа конфигурации на квадрокоптер – „+” конфигурация и „Х” конфигурация. При „+” конфигурацията за контролера 1-ви двигател се намира срещу горната му страна, ако го гледате го гледате с четирите бутона надолу; 2-ри двигател се пада от дясната му страна и т.н. При „Х” конфигурацията 1-ви двигател се пада срещу горния му ляв ъгъл. Която и конфигурация да изберете по-нататък, имайте предвид, че 1-ви двигател трябва да се върти по часовниковата стрелка (следователно и 3-ти трябва да се върти в тази посока, а 2-ри и 4-ти – в обратната).
Накъде ще се върти двигателят зависи от това как сте свързвали трите проводника на двигателя към изводите на контролера на скоростта. В схемата горе съм показал по какъв начин да запоите проводниците, за да постигнете нужната посока (буквите А, В и С са написани върху контролера на скоростта срещу съответните проводници). Два от двигателите трябва да се свържат по единия начин, а другите два – по другия. За да смените посоката на въртене на двигателя, е достатъчно да се размени положението на два от кабелите.
От контролера на скоростта излизат още един трипинов кабел и два по-дебели – червен и черен. Дебелите проводници и са захранващи – трябва да ги запоите към Т-образния конектор, като се ръководите от конектора на батерията, за да сте сигурни, че минуса и плюса на контролера ще отидат при минуса и плюса на батерията. Така запоеният конектор ще се включва към захранващата платка. Имайте предвид, че ако сега захраните контролера с двигателя, нищо друго освен звукова сигнализация няма да последва. За да се завърти двигателят, трябва да се свърже към полетния контролер, след като от там се въведат някои настройки .
След като свържете по указания начин всички двигатели и контролери на скоростта е време да разгледате полетния контролер. Вдясно от дисплея му се намират изводите за контролерите на скоростта. Те са общо осем реда – по три извода на ред – тъй като този полетен контролер поддържа и работа с октокоптери, които имат осем двигателя. Ние ще използваме само четири от тях. Най-отгоре се включва трипиновият кабел на контролера на 1-ви двигател, под него е този на 2-ри двигател и така до 4-ти. Белият кабел е сигнален – трябва да включите конектора така, че белият кабел да се пада откъм вътрешната страна на изводите, до дисплея. Червеният кабел захранва полетния контролер с 5V, а черният е масата.
На този етап вече можете да тествате дали работи полетния контролер. Щом като захраните двигател 1, полетният контролер ще се включи и можете да разгледате менюто му посредством бутоните. По-нататък ще се занимаваме с него, а сега нека свържем и радиоприемника. Вляво от дисплея на полетния контролер има още един набор от изводи, този път пет реда. Те са за петте канала, които може да възприема контролера. Логиката отново е същата. Изводът от вътрешната страна е за сигналния кабел, в средата е +5 V, а масата е в края. Самият приемник също има поредица от изводи – в нашия случай той поддържа шест канала както и външно захранване. Изводът за сигналния кабел отново се пада от вътрешната страна на приемника, следват +5V и маса. Свържете сигналните изводи на приемника със сигналните изводи на полетния контролер, като използвате женско-женски сигнални кабелчета. 1-ви канал на приемника (обозначен е върху него) трябва да отиде към канал „Eileron” на контролера (най-отгоре); втори канал отива към „Еlevator”, 3-ти канал към „Throttle”, 4-ти канал към „Rudder” и 5-ти канал към „AUX”. Всъщност това е принципно свързване и по-нататък вие ще можете софтуерно да размените каналите по свое усмотрение. Приемникът се захранва от полетния контролер и за целта трябва да вземете +5V и маса от някоя от двойките изводи на контролера и да ги свържете към някои от съответните изводи на приемника (не е нужно да взимате +5V и маса от всеки ред изовди).
Остава да сложите зумера, който идва заедно с полетния контролер. Идеята на зумера е да се включва аларма, ако напрежението от батерията падне под определена граница, така че да знаете кога да прекратите полета. За да работи тази функционалност, обаче е необходимо да вземете отнякъде плюс на литиево-полимерната батерия и да го свържете към съответния извод на полетния контролер (виж схемата). Лично аз използвам един мъжки /женски сигнален кабел, чийто женски край свързвам към извода на контролера, а мъжкият край отива към положителния извод от накрайника за балансиране на батерията. Кабел за масата не е необходим.

И това е в общи линии. На този етап при захранване на квадрокоптера всеки от двигателите трябва да издаде поредица от звукови сигнали, а полетният контролер – да се включи. Следващият път ще въведем необходимите настройки в полетния контролер и радиоуправлението, за да се запуснат двигателите.
Следва продължение…