Никога не е било по-лесно да си направите сами летяща машинка. В поредица от статии в нашия сайт ще ви покажем детайлно как да конструирате собствен дрон при минимален бюджет, но все пак достатъчно сериозен, за да не бъде просто детска играчка. Необходими са само: известна сума пари, немалко количество свободно време, базисни технически умения и много желание.
Преди да започнем работа обаче, трябва да си изясним добре какво точно искаме да направим. Така че на първо време ще занимаем с теория. В днешно време думата „дрон” е малко разтегливо понятие, произхождащо от военните безпилотни летателни апарати, които се използват в съвремието ни за шпионаж и прецизни бомбардировки. На практика хората наричат с тази дума всичко, което хвърчи и на него няма пилот – от малките радиоуправляеми самолетчета и вертолети-играчки до орбиталния безпилотен самолет на Boeing – Х-37.
Това, което ние ще направим, се нарича квадрокоптер (на английски – quadrocopter или quadcopter) и то се нарича така, защото по принципа си на задвижване прилича на хеликоптер, но има четири (quadro) носещи “перки” вместо една. Между другото – думата „перка” ми звучи ужасно в случая и поради тази причина ще използваме малко по-коректната „витло”.

Как лети квадрокоптерът
Формата на витлото е такава, че когато то се завърта, въздухът оказва натиск върху долната му повърхност и така са появява полезна теглителна сила, насочена нагоре. При сравнително ниски скорости може да се приеме, че колкото по-бързо се върти витлото и колкото по-голямо е то, толкова по-голяма теглителна сила ще генерира. Едно от предимствата на мултикоптерите е, че като се използват няколко витла, в съвкупността си те произвеждат сравнително голяма теглителна сила дори, ако не се въртят много бързо.
Но може би най-голямото предимство е, че всичките витла на мултикоптера работят за създаване на теглителна сила. Ето какво искам да кажа – всички знаем, че в класическия дизайн на обикновения хеликоптер на опашката му има допълнително витло (опашен винт), чиято ос е перпендикулярна на оста на основното витло (носещия винт) и реално теглителната сила, което то създава не е насочена нагоре, а настрани. Защо е нужно това? Защото носещият винт на хеликоптера, въртейки се в една посока, създава реакция у хеликоптера, заради която самият той би трябвало да се завърти в противоположната посока и за да не се допусне това, силата на опашния винт се използва за париране на потенциалното въртене, а с регулиране на оборотите му се управлява посоката на движение. Хитро, само че опашният винт тежи и не допринася за желаната от нас подемна сила, насочена нагоре, така че по принцип най-добре ще е да го няма.
В дизайна на нашия квадрокоптер, този проблем е решен елегантно. Потенциалното му завъртане се предотвратява по много лесен начин – просто две от витлата му се въртят в една посока, а другите две – в срещуположната.
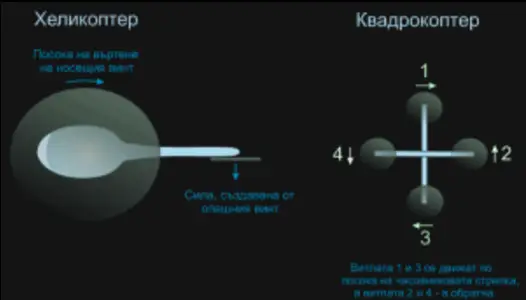
Полетът на квадрокоптера се управлява, като се регулират оборотите на витлата му. Ако намалим скоростта на въртене на едно от четирите витла, квадрокоптерът ще се наклони и ще започне да се движи в посока към изоставащото витло. Ако намалим оборотите на две витла с еднаква посока на въртене, квадрокоптерът ще се завърти около оста си в посока, съвпадаща с посоката им на въртене. Всичко това загатва колко маневрени са квадрокоптерите, но също така и загатва за потенциалните проблеми, които имат тези машинки с устойчивостта и управляемостта си. Проблеми, на които ще се спрем, когато му дойде времето.
А сега ще опишем основните части, които всеки един квадрокоптер има и без които той не може да лети. Много е важно да изучим основните им характеристики и принципа им на работа, за да разбираме и какво точно се случва в квадрокоптера ни и да знаем какво да правим, ако нещо не е както трябва.
Електродвигател

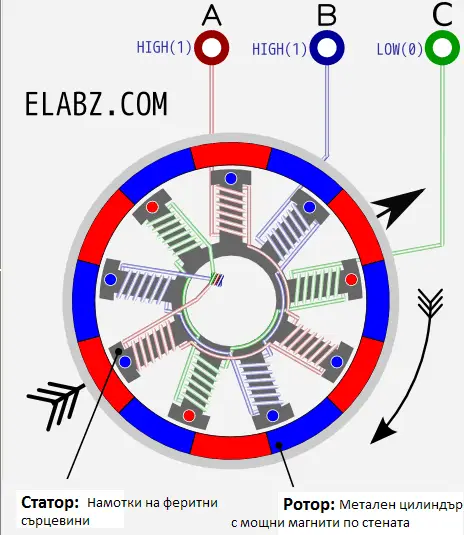
Витлата на квадрокоптера се задвижват от четири броя електрически двигатели. Най-често използваните за любителски цели са безколекторните постояннотокови двигатели (brushless DC motor). Тези електродвигатели имат външен ротор, на който в околовръст са наредени мощни неодимиеви магнити. В статора на двигатела се намират три намотки, които последователно посредством електронен контролер се включват към източник на електричество, като в резултат се получава въртящо се магнитно поле, което завърта ротора. Витлото е закрепено към вала на ротора.
Не е случайно, че този тип двигатели са най-разпространени сред любителите. Те нямат четко-колекторен възел, който усложнява конструкцията на двигателя, намалява надеждността му и увеличава триенето на ротора. Безколекторните двигатели са много прости от механична гледна точка, което обаче се компенсира с усложнената електроника, необходима за управлението им. Всъщност този тип двигатели задвижват вашето CD/DVD устройство.
Безколекторните двигатели, които скоро ще закупите, си имат някакво означение, което завършва с число и буквите „KV” накрая. В случая не става дума за киловолти, всъщност числото с KV ни показва най-важната характеристика на двигателя – колко бързо се върти той. Да речем, че пише 750 KV. Това означава, че на всеки волт приложено електрическо напрежение, двигателят ще се завърти с по 750 оборота в минута, при условие че не е натоварен. Два волта = 1 500 об/минута; три волта = 2 250 об/минута и т.н. Имаме правопропорционална зависимост между напрежение и скорост на въртене.
Другото, което ни интересува от спецификацията на този двигател е какво е максималната му мощност. Когато закачим витлото на двигателя и го пуснем, той ще започне да извършва работа, тъй като витлото трябва да се бори с въздушното съпротивление. Съответно колкото по-бързо се върти двигателят, толкова по-голяма работа ще извършва и толкова повече ще се увеличава големината на тока, протичащ през него. При дадени обороти ще достигнем максималния ток на двигателя, който не добре да надвишаваме, защото двигателят ще прегрее и изгори. Говорим за сравнително голям ток от порядъка на десетки ампери. Обикновено производителят дава тази стойност, както и колко дълго двигателят може да работи в такъв режим. Или пък е дадена максималната мощност, равняваща се на тока по напрежението. От големината на максималния ток зависи какъв електронен контролер ще подберем за двигателя.
От голямо значение при избора на двигател е също така той да е максимално лек. По принцип, колкото по-мощен е двигателя, толкова по-големи са физическите му размери (сечението на електрическите проводници в намотките е по-голямо, за да посрещнат по-големия ток), затова е важно да съобразим отрано размерът на двигателите с размера на квадрокоптера ни. Ако ще правим малък и лек дрон, няма смисъл да му слагаме мощни двигателчета.
Витло

Витлата (propellers) на квадрокоптера са може би най-важните му и същевременно най-подценявани части. Може би защото са пластмасови, прости на външен вид и евтини (в сравнение с останалите работи:)). Не знам… Факт е обаче, че квадрокоптерът ни лети именно благодарение на тяхното движение, така че трябва да подходим внимателно при избора им. Витлата се обозначават чрез две числа ето така: 8х4,5 или 10х3,8, или нещо такова. Първото число ни показва диаметърът на витлото в инчове. Второто число ни показва стъпката на витлото, също в инчове. Какво е стъпка? Стъпка наричаме разстоянието, което ще измине витлото нагоре за един негов оборот. Стъпката се увеличава, грубо казано, когато се увеличава ъгълът, на който са усукани двете лопатки на витлото спрямо насрещния въздушен поток. Колкото по-голям е диаметърът на витлото и неговата стъпка, толкова по-голяма тяга създава то, но също и толкова по-голямо въздушно съпротивление изпитва. Тягата на витлото може да се определи приблизително по следната формула:
![]()
където a e коефициент, зависещ от отношението на стъпката към диаметъра на витлото (0,075 при отношение 1:3; до 0,1 при отношение 1:2), ρ е плътността на въздуха (1,22 kg/m^3за морското равнище при стандартни условия), n e броят обороти за секунда, D е диаметърът на витлото в метри. Или пък ако ви мързи да смятате – тук има калкулатор за вас: http://adamone.rchomepage.com/calc_thrust.htm
По-горе стана ясно, че оборитете на двигателя, а от тук и на витлото, зависят от волтите подадено напрежение. Само че когато витлото се върти, оборотите на двигателя падат, тъй като той трябва да се справя с по-голям товар – ако например двигателят е 750 KV и му подадем 10 V, той няма да се завърти със 7 500 оборота/минута, както би сторил без товар, а с по-малко обороти. Колко по-малко е трудно да се каже. Максималната тяга, която ще създаде витлото при максималните обороти на двигателя в конфигурация с витлото, може да се определи най-лесно и най-вярно по емпиричен път. Имайте предвид обаче че двигателите с висок KV не обичат витлата с голям диаметър и стъпка. Такъв двигател може да се върти бързо, но само ако е с малко витло. Големите витла следва да се поставят само на двигатели с малък KV. Докато оборотите намаляват, въртящият момент на двигателя расте и той може да се справи с по-големия товар.
Сега е моментът да подчертаем дебело колко е важно витлата да са от здрав материал. Те се чупят изключително лесно при досег с препятствие, затова ако не друго, то поне не купувайте най-евтините – тези, направени от тънка лъскава пластмаса.
Електронен контролер на скоростта

Двигателите на квадрокоптера се управляват от контролери (ESC – Electronic Speed Controller) . На брой те са толкова, колкото и двигателите – четири. Контролерът на скоростта представлява електронна платка с програмируем микроконтролер, в която влизат два дебели кабела и излизат три дебели и три тънки кабела. Двата дебели входни кабела са свързани към плюса и минуса на батерията, която захранва квадрокоптера. Трите дебели изходни кабели отиват към трите фази на електродвигателя. Трите тънки кабели са отговорни за управлението на контролера. Те се свързват към полетния контролер и го захранват – полетният контролер е нещо като борден компютър на квадрокоптера, който най-общо казано решава как да предаде приетите от квадрокоптера управляващи радиосигнали, които излъчвате с дистанционното си, към контролерите на скоростта, така че да се постигне желаната маневра.
При избора на контролер на скоростта е важно да съобразим максималния ток, който може да минава през него с максималния ток на електродвигателя. Максималният ток на електродвигателя трябва да бъде по-малък от максималния ток на контролера. Около 1,2 до 1,5 пъти.
Батерия
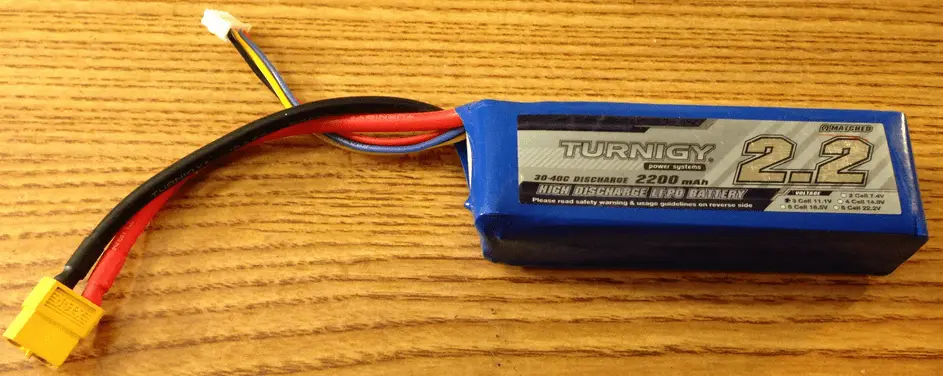
Батерията (battery) е отговорна за захранването на двигателите и всички електронни компоненти на квадрокоптера. Тя трябва да е лека, компактна, презареждаема и с висок капацитет. Типът батерия, който в най-голяма степен отговаря на тези противоречиви изисквания и който се наложил за моделистки цели, е литиево-полимерната (LiPo) батерия. Тя се състои от няколко отделни батерийни клетки, които са свързани последователно и имат номинално напрежение 3,7 V. В зависимост от броя клетки в батерията е възможно тя да дава 3,7 V (една клетка), 7,4 V (две клетки), 11,1 V (три клетки) и 14,8 V (четири клетки). Броят клетки в батерията се указва с цифра, след която е написана буквата “S”. Например 3S батерия ни дава 11,1 V. Първото, което гледаме, когато си избираме батерия, е именно това – нейният волтаж. Той трябва да е съобразен с двигателите, които ще използваме. Няма смисъл да използваме 4S батерия в конфигурация с двигатели и витла, които не могат да достигнат оборотите при такъв волтаж. По принцип производителите на двигатели указват каква батерия да вземете за тях, но ако тази информация липсва, най-универсалният избор е 3S батерия.
Следващото, което ни интересува, е капацитетът на батерията – колко mAh е. Батерия от 1 000 mAh е способна да дава ток с големина 1 А в продължение на час. Може би ви се струва много, ала всъщност не е. Да речем, че нашият средняшки двигател консумира максимален ток 15 А. Имаме четири двигателя, следователно максималната консумация е 4 х 15 = 60 А. Нашата батерия от 1 000 mAh ще може да захранва двигателите при такава консумация само една мизерна минута! Затова избирайте батерия с максимално голям капацитет – от тази характеристика зависи колко време ще изкара квадрокоптерът във въздуха. Само дето увеличаването на капацитета струва $. Тук има един съществен момент – разликата между цените на батерия от 1 000 mAh, да речем, и такава от 2 200 mAh не е много голяма, макар че с втората батерия получавате двойно повече летателно време. При високите капацитети (над 5 000 mAh) обаче всеки допълнителен mAh започва да струва все повече и повече, така че дори минимално увеличение на капацитета води до едва ли не експоненциално нарастване на $. С други думи, ако разполагате с ограничен бюджет – целете се в батерия с капацитет между 2 000 и 3 000 mAh, с по-малък капацитет просто не си струва, а с по-висок идва в повече на бюджета. Между другото – капацитетът на батерията може да бъде увеличен, когато клетки на батерията се свържат паралелно. Това е указано в обозначението на батерията примерно по следния начин: 3S2P (два комплекта 3S батерии, свързани паралелно).
При батериите има още един важен параметър – максималният темп на разряд. Той е отбелязван с число и буквата „С” след него. Ако умножим това число по капацитета на батерията, ще получим максималния ток, който можем да „дърпаме” от батерията. Естествено този ток трябва да бъде по-висок от тока на максимална консумация иначе имаме проблем. В нашия пример двигателите консумират максимум 60 A. Ако батерията ни е от 2 200 mAh, това означава, че темпът й на разряд трябва да бъде най-малко 30С, за да сме редовни.
Радиоуправление

За да контролирате полета на квадракоптера, трябва да разполагате с предавател на управляващи сигнали – дистанционно в ръцете ви – и приемник на тези сигнали, който се намира на борда на квадракоптера. Радиоуправлението (Remote control) на квадрокоптерите и прочее дрони най-често се осъщестява на честота 2,4 GHz. При такава честота управляемост на квадрокоптера се постига при пряка видимост между предавател и приемник до около 100 m максимално отстояние. За по-далечни разстояния (от порядъка на km) са популярни друг вид радиоуправления на честота 433 MHz.
Каквото и радиоуправление да използвате има някои общи моменти при всички типове. Така например независимо от това какво управлявате – количка, корабче, самолетче или квадрокоптер – дистанционното ви излъчва сигнали на някоколко канала. За летящите неща, към които спада и дронът ни, каналите са минимум четири и се наричат: throttle (thro), yaw, pitch и roll. Throttle (в груб превод „газ”) е онази ръчка, която пилотите на самолети дърпат, за да регулират оборотите на двигателите и от тук – тягата им. В нашия случай става дума за това да регулираме мощността на четирите двигателя на квадрокоптера. “Yaw”, “pitch”, “roll” са термини от авиацията и корабоводеното и на български означават съответно „курс”, „тангаж” и „крен”. Фактически това са ъгли, които квадрокоптерът сключва спрямо трите оси на координатната система, минаваща през центъра му. На тази картинка е показано нагледно какво означават:
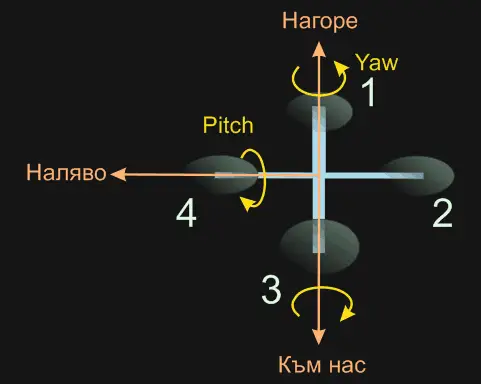
Управлявайки yaw, pitch и roll, вие управлявате наклона на квадрокоптера и съответно пространственото му движение в хоризонтална плоскост; управлявайки throttle вие управлявате тягата му и съответно височината му. За да управлявате тези четири канала на дистанционното ви има два стика които се движат нагоре-надолу за два от каналите и наляво-надясно за другите два от каналите. От приемника, който сте сложили на квадрокоптера, излизат 12 жички – по три на канал („5 V”, „маса” и „сигнал”), които отиват към полетния контролер.
Полетен контролер
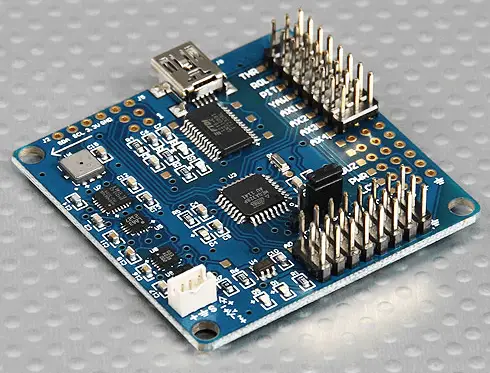
Мозъкът на квадрокоптера. Както бе споменато, на полетния контролер (Flight controller) се пада задачата от една страна да изпълнява управлението на дрона, а от друга – да поддържа стабилността на полета му. За да се справя с това, той трябва да разполага с данни. А тези данни идват от най-различни сензори, вградени в електронната му платка. Основните сензори, без които не може, са 3 жироскопични датчици, показващи с каква ъглова скорост квадрокоптерът се върти спрямо трите оси, като след интегриране на тези данни се установяват и ъглите на курс, крен и тангаж. Изходите от тези сензори се обработват съвместно с данните от приемника на радиосигнали и съобразно тях компютърът изработва управляващи сигнали и ги подава към контролерите на скоростта.
Позиционирането на квадрокоптера единствено чрез жироскопични датчици обаче е свързано с един проблем. При изчисляването на ъгловите скорости се получава някакъв остатък, който не може да бъде компенсиран. Например, ако квадрокоптерът се е въртял около ос Х и е спрял да се върти, изходът от съответният датчик може да не отчете 0 градуса/секунда, а -1 или +1 градуса в секунда. Практически това означава, че всяко едно минимално смущение в положението на квадрокоптера ще го накара да се отнася бавно в някаква посока, вместо да се седи мирно на едно място във въздуха, както сте му наредили. Тъй като това е дразнещо, можете да си изберете контролер с допълнителни акселерометрични сензори, които елиминарат този недостатък. А можете да си купите и контролер с цял куп други екстри – GPS, магнитометър, сонар и какво ли не. Излишно е да споменавам, че това струва $.
Полетният контролер има програмируем микроконтролер с връзка към персонален компютър, чрез който можете да го програмирате собственоръчно. Но ако това не ви е стихията няма страшно – за начинаещи като нас има контролери с максимално улеснено програмиране чрез дисплейче, бутончета и вградено контекстно меню.
Рамка

Рамката е още една от несправедливо пренебрегваните части на квадрокоптера. Тя е важна, защото към нея са закрепени всички от гореописаните неща и защото понася натоварванията на квадрокоптера. Които, поне в началото – докато се учите как да го приземявате, никак не са малки. Най-често рамката е под формата на + , като в четирите й рамена за закрепени двигателите заедно с витлата и контролерите на скоростта, а на една централна пластина са закрепени полетния контролер, батерията, радиоприемника и всичко останало. При рамката с най-голяма сила са изразени двете противоречиви изисквания – да е здрава и да е лека. Тя е най-тежкият компонент на квадрокоптера, заемащ от 1/4 до 1/3 от теглото му и е важно да не се олеем в стремежа си да я направим прекалено здрава. От друга страна рамката не е трябва да е и прекалено паянтова, освен ако не искаме да я ремонтираме всеки път. Най-популярните материали за изработка на този компенет са: балса, алуминий и карбонови полимери. Карбоновите полимери са най-добри и разбира се – най-скъпи.
Тук е важно да се съобрази, че размерът на рамката и респективно на квадрокоптера, зависи от размера на витлата – разстоянието между два съседни двигателя (т.е. между краищата на рамената) трябва да е около 1,5 от диаметъра на витлото.
Друго
Тук влизат всички ненатрапчиви детайли, които стават очевидни едва в хода на работа. Някои от тях са си направо възлови. Например – батерията трябва да захранва четирите контролера, но от нея излизат само два кабела – значи трябва да измислим някаква платка, която да осигури разпределението на електричеството, при това доста сериозна, защо през нея ще минават десетки ампери. Трябва да вземем и подходящи куплунзи за кабелите, за да можем спокойно да ги изключваме и включваме. Ами какво правим, когато батерията се изтощи? Трябва да я заредим, но стандартно LiPo батериитe се продават без зарядни устройства, така че трябва да си набавим и такова. Освен това абсолютно задължително е наличието на поялник, мултиметър и познания за работа с тях. Препоръчително е да имаме и електронна кухненска везна.
Към „друго” спадат и всевъзможните аксесоари, които рано или късно ще поискаме да сложим на квадрокоптера. Все пак за какво ви е дрон, ако не заснемете жестоко видео с него?
Здравейте г-н Петков. Хареса ми статията ви. Аз съм бивш авиационен радиоелектронен инженер. 11 години съм обслужвал самолетите МИГ29, но това вече е минало. Гледах няколко видеоклипа и стигнах до извода че дроновете са бъдещето, в действителния смисъл на думата, като превозно средство. ПО моите наблюдения почти вече няма места за паркиране на автомобилите. И ме налегна идеята за създаване на дрон който да може да ме вози и мен. Не съм професионалист в тази област но ти знаеш че ние българите сме много способни. По принцип обичам да програмирам микроконтролери Microchip PIC. Ползавам също Microsoft Visual studio за програмиране… Read more »
Здравейте, Miroslav. Лично аз не смятам, че в скоро време ще видим дронове като средства за превоз на хора. Може би това е бъдещото наистина, но не и в обозримо време. Наред с всички предимства, които биха дали дроновете на транспорта, все още има редица неясноти от практически и инженерен характер. Дори малките дронове-играчки от типа на квадрокоптерите в най-скоро време ще бъдат подложени на административни регулации, тъй като практиката показва, че колкото по-разпространени стават, толкова повече инциденти се случват с тях. Иначе браво за ентусиазма ви 🙂 Хората започнаха да правят все по-големи „дронове“ и в интернет можете да… Read more »