
В тази статия ще научите как да конфигурирете дрона си, който сглобихте миналия път, така че той да полети. Макар и досадно, конфигурирането на настройките на дистанционното управление и на полетния контролер е изключително важно и преди него не можете да направите нищо с дрона си – дори да го включите. Ето какво трябва да направите стъпка по стъпка.
Настройка на дистанционното радиоуправление
Дистанционното управление FS-CT6B идва без инструкции за работа от производителя. Но пък има любителски такива, които покриват всички въпроси – свалете си ги от тук и тук и ги прочетете, ако срещнете затруднения. Преди всичко разгледайте дистанционното – на него има On/Off ключ, два стика, които се местят нагоре-надолу и наляво-надясно – с тях фактически се управлява движението на квадрокоптера. Освен това встрани от стиковете има плъзгачи за фина настройка (тримиране), два ЦК ключа (от тях ще използваме само левия) с врътки за настройка (които няма да използваме в управлението). Има и бутон, наречен Bind Test Range, който също няма да използваме на този етап (служи за това да настрои приемника да изпълнява команди само от вашето дистанционно).

Следва да инсталирате на компютъра си драйвери за USB кабела и програмата, чрез която ще настройвате дистанционното си – T6config. По принцип те са записани на инсталационен диск, който би трябвало да сте получили заедно с дистанционното, но от този пакет можете да изтеглите всичко накуп. След това стартирайте програмата, включете дистанционното и го свържете към USB порт на компютъра си посредством кабела. От бутона Settings на програмата изберете използвания за връзката COM порт и кликнете върху бутона „Get User” Зелените барчета в прозореца трябва да се променят при мърдане на управляващите стикове на дистанционното.
За ваше улеснение съм записал необходимите настройки, които трябва да се направят в ето този конфигурационен файл. Достатъчно е да отворите файла, докато дистанционното е включено към програмата, за да възприеме то настройките от файла. При тези настройки преместването на двата стика на дистанционното трябва да доведе до следното управление на квадрокоптера (двигателите са в „+ конфигурация” спрямо полетния контролер):
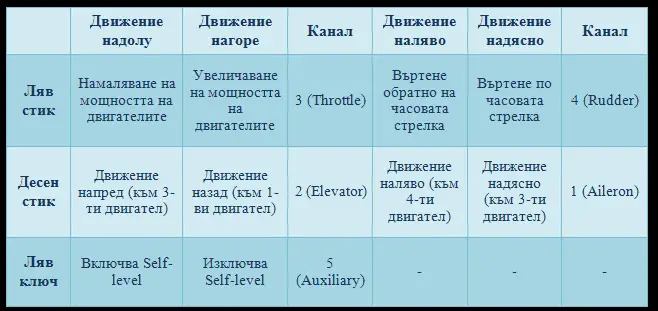
Посоченото управление на стиковете е най-разпространеното сред пилотите на квадрокоптери и поради тази причина ви препоръчвам да го използвате и вие (по-лесно ще намерите информация в интернет, ако нещо сте объркали). Иначе от програмата можете да размените каналите за управление (чрез бутон Stick), посоките на управление (бутон „Revserve”) и да зададете диапазон на управление (бутон EndPoint). Има и сума ти още опции, повечето от които с неясно предназначение. Поиграйте си с тях, ако ви се занимава, но имайте предвид, че програмата много лесно позволява сдвояване на каналите (управление по един канал, води до промяна в друг канал), което поне за начинаещи е неприятна опция.
Настройка на полетния контролер
ВНИМАНИЕ!!! ДОКАТО НАСТРОЙВАТЕ ПОЛЕТНИЯ КОНТРОЛЕР, МАХНЕТЕ ВИТЛАТА ОТ ДВИГАТЕЛИТЕ!!! Те не би трябвало да се включат засега, но има и такава вероятност.
Можете да се запознаете с упътването за работа с полетния контролер тук. Също така със сигурност ще ви бъде от полза и изобилието от клипчета в youtube, които показват как да настроите един КК 2.1 полетен контролер. Имайте предвид само, че на някои от тях се работи с различни версии на нашия полетен контролер и съответно има малки разлики при настройването. Все пак препоръчвам да изгледате поне ето това клипче:
[youtube_sc url=“http://www.youtube.com/watch?v=lRbAqH-zjVs“ width=“640″ rel=“0″ fs=“0″]
Преди да въведем каквито и да е настройки в полетния контролер, трябва да се убедим, че той работи коректно. За да проверите това, направете следното:
I. Включете дистанционното управление
II. Включете полетния контролер
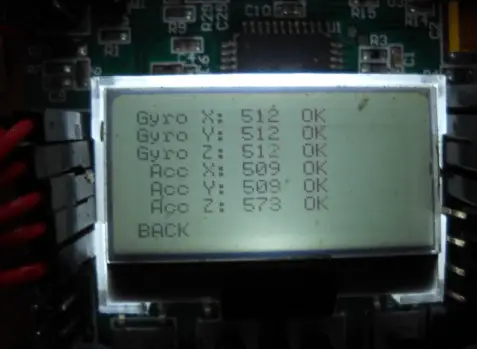
III. От менюто на полетния контролер изберете чрез бутоните „Sensor test”. Би трябвало да виждате стойности на всеки от сензорите, придружени с отметка ОК. Ето така:
IV. От менюто на полетния контролер изберете чрез бутоните „Receiver test”. Раздвижете стиковете на дистанционното –стойностите срещу всеки канал на дисплея на контролера би трябвало да се променят. Проверете дали когато местите стиковете, те предизвикват управление в контролера според таблицата по-горе. Например като местите левия стик нагоре-надолу, би трябвало да наблюдавете промяна в канала Throttle. При крайно долно положение, следва да се изпише „Idle”, а при крайно горно – „ Full”.
Вече можете да започнете с настройките. Докато сте в „Receiver test” трябва да нулирате каналите, т.е. при неутрално положение на стиковете (и крайно долно на левия стик) срещу всеки канал стойността трябва да бъде 0 (или ±1). За целта преместете четирите плъзгача за тримиране отстрани на стиковете на дистанционното, докато стойностите не се нулират. Трябва да виждате ето това:

V. Отидете в “Load motor configuration”. От тук ще изберете конфигурация на двигателите, чрез която контролерът „разбира” къде спрямо него се намират те. В случая на квадрокоптерите са възможни два режима – Quadcopter + mode и Quadcopter x mode. Аз използвам + режима, тъй като двигателите в моя случай се намират срещу страните на контролера, а не срещу ъглите му. След като въведете режима, контролерът ще ви покаже къде спрямо него се намират двигателите (по-късно можете да видите същото от “Show motor configuration”).
VI. Отидете в “ACC calibration”. Това е важна настройка, която показва на полетния контролер кое е хоризонталното му референтно положение. Поставете квадрокоптера на равна повърхност, като се убедите, че той е хоризонтален (нивелирайте повърхността или използвайте за ориентир показанието на вградения жироскопичен сензор на контролера). Докато настройката се извършва, не докосвайте квадрокоптера.
VІI. Вече можете да пристъпите към настроката на контролерите на скоростта („ESC calibration„). Това е може би най-важната настройка, без която квадрокоптерът няма да може да лети. Тя позволява синхронизирането и едновременното запускане и на четирите двигателя. За да изпълните коректно тази настройка, е важно да спазите следните стъпки (витлата са свалени – да припомня!):
- Полетният контролер, контролерите на скоростта и дистанционното управление са изключени.
- Включете дистанционното, като поставите стика за throttle (левия) в крайно горно положение.
- Включете захранващата платка към батерията. Веднага след като я включите или докато я включвате натиснете и задръжте първия и четвъртия бутон на полетния контролер. Това е малко трудно и може би ще ви е нужен допълнителен чифт ръце. Основното меню на полетния контролер няма да се зареди. На екрана ще се изпише „throttle pass-through” и ще чуете два кратки звукови сигнала.
- След като чуете сигналите и докато държите натиснати първи и четвърти бутон, преместете стика за throttle в крайно долно полежение. Отново ще чуете звукова сигнализация – поредица от кратки сигнали, завършващи с един по-продължителен.
- ESC калибрирането е завършено. Изключете всичко от захранването.
Важно! ESC калибриране ще трябва да правите всеки път, когато сменявате двигател или контролер на скоростта. Имайте предвид, че когато настройвате квадрокоптера си е хубаво да започнете с това калибриране (веднага след Load motor configuration), въпреки че реално последователността на настройките е без значение. Работата е там, че е възможно да объркате нещо в ESC калибрирането и поради това ще трябва да направите Factory reset, при което ще загубите и всички други настройки, които сте направили досега.
VІІІ. След ESC калибрирането можете да продължите с останалите настройки, сред които най-важни са настройките на PI editor-a. Включете отново полетния контролер и изберете от менюто „PI editor„. PI editor-ът позволява настройване на вградения в полетния контролер PID регулатор, чието действие ще бъде по-подробно обяснено в някоя от следващите статии. Засега е достатъчно да знаете, че този регулатор е критичен за управлението на квадрокоптера и от настройките, които ще въведете, зависи колко стабилно ще лети квадрокоптерът и колко бързо ще реагира на управлението.
В PI Еditor-а на КК полетния контролер имате възможност да изменяте коефициенти, наричани Limit и Gain (за P или за І) за всяка от трите оси на квадрокоптера – Yaw, Pitch и Roll. Под наименованието Gain се крият коефициенти на усилване. Препоръчителните от производителя стойности на този коефициент за Р-звеното са 50 и за трите оси, а на I-звеното – 25. Под Limit се разбира каква част от разполагаемата мощност на двигателите в проценти да отива за компенсация на грешката около съответната ос. Максималната стойност на този коефициент е 100 (100% от мощността на двигателя отива за компенсиране на грешката). Препоръчинелните стойности на P Limit са 100 за оси Pitch и Roll и 20 за ос Yaw; препоръчителните стойности на І Limit са 20 за оси Pitch и Roll и 10 за ос Yaw. Важното тук е да слагате по-малки Limit коефициенти за оста Yaw, тъй като тя е по-маловажна за управлението от другите две оси.
За оптималните настройки на PI-editor-а е необходимо да проявите експериментализъм, а и да понатрупате опит при пилотирането на дрона. Имайте предвид, че като вдигате Р коефициентите, квадрокоптерът ще реагира по-бързо на управлението, но също така и полетът му ще бъде по-неустойчив. І-коефициентите, са по-маловажни, те компенсират остатъчни грешки, но прекомерното им увеличаване също ще доведат до неустойчивост. Според мен с настройките, които препоръчва производителя, управлението на квадрокптера е твърде мудно. Затова всъщност за моя квадрокоптер съм настроил P Gain над 140 за Roll и Pitch осите и І Gain около 20, но това е по-скоро въпрос на вкус. Най-добрата практика, която споделят повечето пилоти на дрони, е да започнете от някакви ниски стойности първоначални стойности на P gain (например 40) и I gain (например 0) и постепенно да ги увеличавате, докато квадрокоптерът не започва да проявява признаци на неустойчивост – бавно затихващи колебания около някоя от осите.
IX. Сега отидете в „Self-level Settings„. Там ще попаднете на меню, подобно на PI-editor-а, но този път P gain и P limit коефициентите се отнасят за това как квадрокоптерът ще изпълнява функцията self leveling, сиреч да поддържа хоризонтално положение. Ето за какво иде реч: вие можете да пилотирате дрона си по два начина – с включен и с изключен self leveling. При изключен self leveling дронът се управлява по-лесно, но има опасност да го наклоните прекалено и да го разбиете. Освен това е необходимо да направите перфектно балансиране на центъра на тежестта, защото в противен случай квадрокоптерът ще се отнася към страната, която тежи повече. При включен self leveling дронът се стреми да поддържа хоризонтално положение, а управлението става малко по-бавно и тромаво. Кой от двата режима ще ви е по-удобен отново е въпрос на вкус, но вероятно поне в началото, докато се учите да пилотирате, ще използвате self leveling.
Важно е преди да въведете настройките, да сте конфигурирали PI editor-a, така че квадрокоптерът да изпълнява стабилен и управляем полет без включен self-leveling. Ако PI еditor-ът не е добре конфигуриран, self leveling настройките само ще влошат нещата. Тук имате да настроите четири неща: P Gain, P Limit, ACC Trim Roll и ACC Trim Pitch. Изобщо не се опитвайте да слагате ниски стойности на коефициентите P Gain и P Limit – квадрокоптерът ще стане напълно неуправляем. Добра стабилност би трябвало да постигнете при P Gain и P Limit над 50 (аз съм ги настроил на 100 и 80 съответно). Що се отнася до ACC Trim Roll и ACC Trim Pitch – те компенсират отнасянето на дрона, което евентуално би се проявило, въпреки self leveling функцията. ACC Trim Roll компенсира отнасяне в посока наляво или надясно, а ACC Trim Pitch – в посока напред-назад. Тук трябва да въвеждате положителни или отрицателни числа, които са строго индивидуални. Просто трябва да видите в каква посока отива дрона ви всеки път, без да пипате стиковете за управление, и след това да направите необходимата корекция (по принцип коефициентите тук са в рамките на -10 до 10). Може да се окаже и че няма нужда да пипате тези коефициенти (поздравления, дронът ви е идеално симетричен!) – тогава оставяте 0-те, както си е по подразбиране.
Х. Отидете в „Mode settings„. Изберете Self-level да се активира чрез AUX. Така ще можете да включвате self-leveling чрез превключване на лявото ЦК ключе.
ХІ. Отидете в „Misc. settings„. В реда, на който пише Alarm 1/10 volts, въведете числото 105. По този начин настройвате алармата на контролера да се включва, когато батерията на квадрокптера падне до 10,5 V. Разбира се, за да работи изобщо функцията „аларма”, трябва да сте свързали зумерчето към полетния контролер , както и положителния извод за измерване на напрежението на батерия с „+” на батерията (виж миналата статия).
Ами май че е това! Има още доста настройки, но те не са толкова важни. Чак сега вече, след като изписахме по темата четири статии с няколко хиляди думи, можем да пристъпим към пускането на квадрокоптера. Ето как става номерът, в случай че се питате:
Пускане на квадрокоптер
След като сте въвели настройките от по-горе, вече можете да проверите дали квадрокоптерът работи както трябва. За първи полет все още ви е рано, така че ако не сте махнали витлата досега, МАХНЕТЕ ГИ, иначе рискувате да се нараните и да повредите квадрокоптера. Стъпките са следните:
- Включете дистанционното управление
- Включете разпределителната платка към батерията. Четирите контролера на скоростта и полетният контролер ще се включат. От всеки един от четирите контролера трябва да чуете следната звукова сигнализация (при условие че използвате като моите):
Ако не чуете тази сигнализация, имате проблем – или с ESC калибрирането или с контролерите. На екрана на полетния контролер би трябвало да видите следното:

Ако се изписва съобщение за грешка – най вероятно имате проблем с комуникацията.
- Преместете левия стик в крайно долно и крайно дясно положение. Отново ще чуете звуков сигнал, а на екрана на полетния контролер ще се изпише „ARMED”. Ако нищо не стане, проверете в “Receiver test” дали като премстите левият стик максимално надолу, срещу Throttle се изпизва Idle и дали като преместите същия стик на дясно, срещу Rudder се изписва „Right”.
- Започнете да премествате левия стик плавно нагоре. Оборотите на двигателите би трябвало да се увеличават. Забележете дали някой двигател не прецесира и не вибрира силно – ако имате такъв двигател, то или закрепването на двигателя е лошо или имате механически проблем с него.
- Тествайте дали квадрокоптерът може да парира неравновесни състояния. Наклонете го малко на една страна и наблюдавайте дали оборотите на двигателя откъм наклонената страна ще се увеличат. Ако няма промяна, или не сте си настроили както трябва PI editor-a, или имате проблем със сензорите на полетния контролер. Тествайте и управлението – мръднете насам-натам другия стик и наблюдавайте дали това ще предизвика промяна в оборотите на съответните двигатели.
- След като приключите, поставете левия стик в крайно долно и крайно ляво положение. Отново ще чуете звуков сигнал, на екрана вече няма да пише „ARMED”, а ще се върне обичайния изглед. Сега вече можете да изключите дистанционното и да прекратите захранването към полетния контролер и контролерите на скоростта.
Ако тестът е преминал успешно – поздравления, вашият дрон е готов да полети! Ако не – не унивайте! Прегледайте отново упътванията за настройка, колкото и да е досадно това. Най-вероятно някъде имате някакъв пропуск. И ако пак нищо не стане, пишете в коментарите, за да поумуваме заедно.
Следващият път ще получите някои указания за първия полет с вашия собственоръчно изработен дрон!
Благодаря за положеният от Вас труд и съпътстващия споделен опит от практика! Предложени са някои оригинални техники за изработка, например „захранващата платка“.
Четирите статии са полезни за всеки начинаещ, занимаващ се в спектъра „дронове“.
Ако може да споделите опит за техники при изроботката на „трикоптер, и по- специално за опашното му управление и евентуалното му управление чрез същия KK 2.1 контролер. Благодаря!
И аз благодаря за положителната обратна връзка. За съжаление не мога да ви бъда от полза, относно въпроса за трикопетер конфигурацията. Знам със сигурност, че КК контролерът поддържа такава конфигурация, но тъй като не съм експериментирал с такъв вариант, не мога да го коментирам. Всъщност в момента изпробвам нов полетен контролер, базиран на ArduPilot и имащ много по-богата функционалност, от описания тук КК контролер. Може би в скоро време ще направя и едно ревю на този контролер.
Благодаря Ви за изчерпателните обяснения. С моят син се занимавахме дълго време точно с това, но самото програмиране – връзката между радиоуправлението и „мозъка“ на квадрокоптера не можахме да я направим сполучливо, въпреки многократните ни опити. Нашият полетен контролер е базиран на Ardu програмиране.
Възможно ли е да получим помощ за този проблем?
След като имате контролер, базиран на Ардуино, то най-вероятно го настройвате през програмите Mission Planner или APM Planner. И в двата случая още при първоначалното настройване се изисква да направите радиокалибрация на стиковете за управление, чрез която можете да видите дали въобще контролерът разпознава управлението и правилно ли сте задал каналите. Ако като местите стиковете не виждате промяна в баровете за сигналите на всеки канал, то значи имате проблем с дистанционното или радиоприемника, който се свързва към контролера. Ако проблемът е някакъв друг, то моля опишете го по-подробно 🙂 Ще се опитам да намерим решение с уговорката, че може би… Read more »
Благодаря за отговора. Пробвали сме и с Mission Planner и с APM Planner. Видимо спазваме всички настройки, но крайния резултат не е правилен. Квадрокоптера се преобръща почти веднага. Съмнявам се, че неправилно програмираме още с настройките на дистанционното, което е Turnigy 9x.
Ако се преобръща още преди да е излетял, значи причините са много по-сериозни от недобре настроено радиоуправление (долу ще ви ги опиша). Ако тръгва да излети и след това се накланя на една страна, значи най-вероятно PID параметрите не са ви настроени добре. По-принцип квадрокоптерът би трябвало да излети и без изобщо да пипате тези параметри, но ако тежи повече от едната си страна, той ще се наклони натам при недостатъчно голямо Р. Но да се върнем на първия вариант – квадрокоптерът се накланя рязко на една страна и се преобръща. Ето най-вероятните причини: 1) Неправилно ориентиран контролер – ако… Read more »
Благодаря за изчерпателните обяснения. Напълно е възможно проблема да е в конфигурацията на моторите както сте обяснили в т.2 . Ще пробваме отначало всичко. Надявам се, пък и придобих смелост, че най-накрая ще можем да довършим започнатото. Ще ви уведомим за резултатите.
Г-н Петков, какво ли не опитах и пробвах, но не мога да се похваля с никакъв напредък. Започнах съвсем отначало – със съединяване на кабелите от моторите към регулаторите – от там към приемния модул – от там към „мозъка“ . Чрез Mission Planner калибрирах всичко отначало и докрай – показа, че всичко е завършено и наред.
Вече се съмнявам, че някъде греша нещо основно и фундаментално! Може ли да ви изпратя снимки на свързванията по някакъв начин?
„Започнах съвсем отначало – със съединяване на кабелите от моторите към регулаторите – от там към приемния модул – от там към „мозъка““ Тук съзирам грешка в логическата верига, дано да е само в изказа 🙂 ESC регулаторите на моторите трябва да се свържат направо към „мозъка“ – полетния контролер, а не към радиоприемника. Радиоприемникът също трябва да се свърже към „мозъка“, но за целта „мозъкът“ си има отделни изводи от тези за регулаторите. Моля, потвърдете, че не сте свързал регулаторите към радиоприемника. Иначе за снимките – снимайте и ги качете някъде, ще се опитам да помогна така, но се… Read more »
Грешно съм ги написал. Свързани са точно така, както вие сте ги описали. Прилагам и две снимки на различните свързвания и една снимка на целия квадрокоптер:
http://prikachi.com/images.php?images/402/9005402H.jpg
http://prikachi.com/images.php?images/403/9005403o.jpg
http://prikachi.com/images.php?images/404/9005404N.jpg
prikachi.com/images.php?images/404/9005404N.jpg
prikachi.com/images.php?images/403/9005403o.jpg
prikachi.com/images.php?images/402/9005402H.jpg
Ясно. Прегледах снимките и поне на пръв поглед не виждам някаква грешка в свързването. Нека да преговорим пак проблема – моторите тръгват, но квадрокоптерът почти веднага се накланя и се опитва да се преобърне, нали така? Всеки път ли се накланя на една и съща страна? Решил си да използваш малко по-особена конфигурация на рамката, което по принцип е ОК, но за начинаещи е най-добре да се придържат към класическия +. Виждам, че си извадил полетния контролер – предполагам, че е за снимката, но по принцип той трябва да е здраво закрепен и след всяко местене трябва да правиш пак… Read more »
Винаги се накланя на различни страни. Полетния контролер е здраво закрепен, но вече и двигателите не се въртят, след последния ми опит и вече съвсем не мога де предположа и разбера какъв е проблема! Затова имам молба – възможно ли е да ви го изпратя за да пробвате и и вие, / като естествено си поемам всички разходи и разноски / , пък дано да стане – това ми е последната надежда?
С удоволствие бих помогнал и физически, но напоследък съм плътно ангажиран с други неща. Всъщност не ми остава време да се занимавам дори с моя си квадрокоптер. Изобщо това е едно хоби, което изисква време и отдаденост (и пари, разбира се), така че дори да подкарате вашата машинка, имайте предвид, че след това ще трябва да си блъскате главата с други проблеми, но на по-високо ниво 🙂 И въобще цялото нещо започва да става досадно в един момент. Но пък е голяма играчка за ума.
Благодаря. Ще пробвам отново.
Имам дистанционно на 2.4 от дрон който загубих и тарантула х6 без дистанционно!
Въпроса ми е им ли начин да ги свържа?
Благодаря
Може и да стане, но няма гаранция. Дистанционното и приемника трябва да са сдвоени (paired). Досега не ми се е налагало да съвместявам различни модели, но тук е описано как може да стене – http://www.tomsguide.com/faq/id-2374215/pair-remote-drone.html
Поздрави.